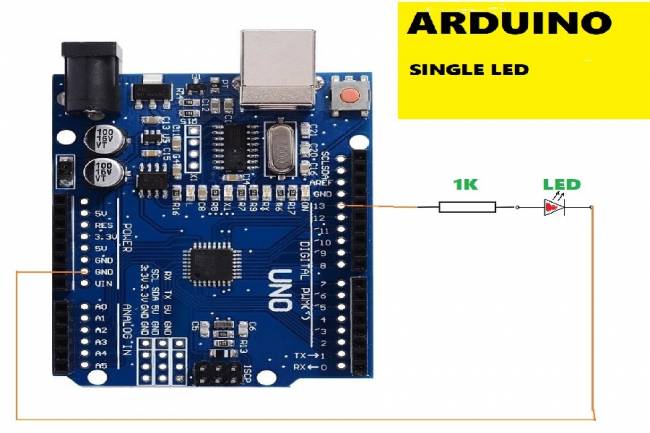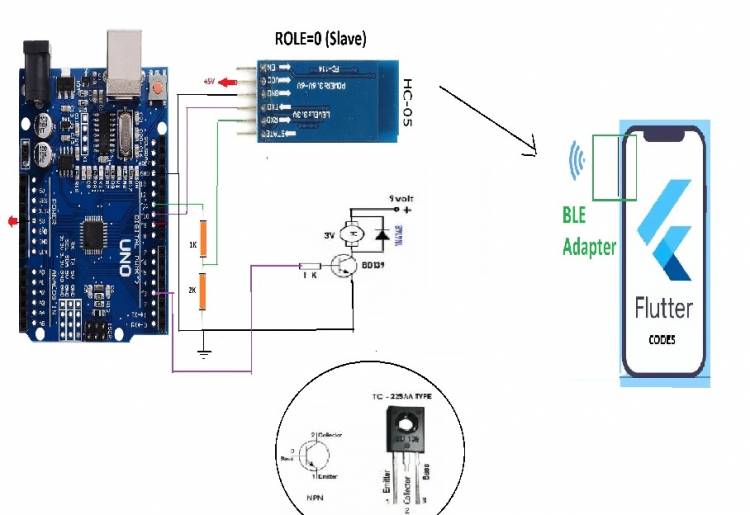
DC Motor Speed Control by Android phone
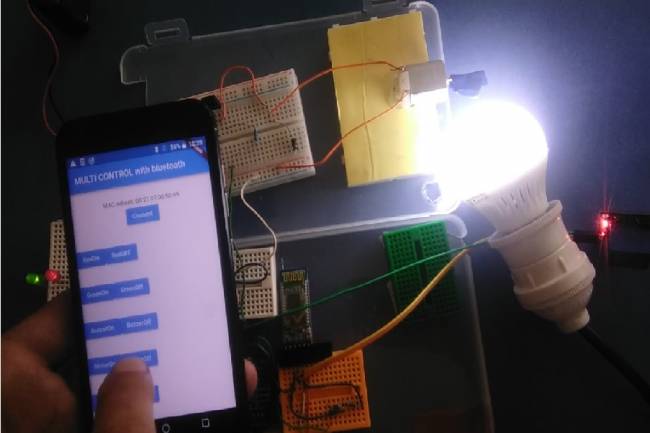
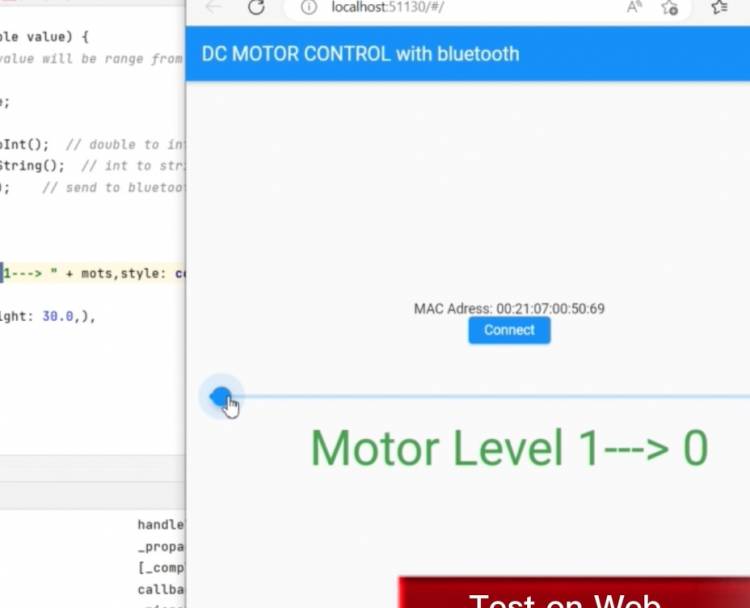
This application we made with Flutter-Dart codes is a DC Motor speed control application. Using the Slider widget, we generate analog values between 0 and 250 and send this value to the bluetooth adapter with the sendData function.
On the microcontroller side, rec_data=mySerial.readString(); We read the line. We convert this value to integer type and send it to DC motor with AnalogWrite command.
Flutter-Dart Codes:
import 'dart:async';
//import 'dart:convert';
import 'package:flutter/foundation.dart';
import 'package:flutter/material.dart';
import 'package:flutter_bluetooth_serial/flutter_bluetooth_serial.dart';
void main() => runApp(const MyApp());
class MyApp extends StatefulWidget {
const MyApp({super.key});
@override
// ignore: library_private_types_in_public_api
_MyAppState createState() => _MyAppState();
}
class _MyAppState extends State<MyApp> {
List<BluetoothDevice> _devices = [];
late BluetoothConnection connection;
String adr="00:21:07:00:50:69"; // my bluetooth device MAC Adres
double sval = 10;
String mots="0";
late int motint=0;
@override
void initState() {
super.initState();
_loadDevices();
}
Future<void> _loadDevices() async {
List<BluetoothDevice> devices = await FlutterBluetoothSerial.instance.getBondedDevices();
setState(() { _devices = devices; });
}
//----------------------------
Future<void> sendData(String data) async {
data = data.trim();
try {
List<int> list = data.codeUnits;
Uint8List bytes = Uint8List.fromList(list);
connection.output.add(bytes);
await connection.output.allSent;
if (kDebugMode) {
// print('Data sent successfully');
}
} catch (e) {
//print(e.toString());
}
}
@override
Widget build(BuildContext context) {
return MaterialApp(
home: Scaffold(
appBar: AppBar(
title: const Text("DC MOTOR CONTROL with bluetooth"),
),
body: Center(
child: Column(
mainAxisAlignment: MainAxisAlignment.center,
children: [
const Text("MAC Adress: 00:21:07:00:50:69"),
ElevatedButton(child:Text("Connect"),onPressed: () {
connect(adr);
},),
SizedBox(height: 30.0,),
Slider(
min: 5, //add min and max
max: 250,
value: sval,
onChanged: (double value) {
//by default value will be range from 0-1
setState(() {
sval = value;
});
motint=sval.toInt(); // double to int
mots=motint.toString(); // int to string
sendData(mots); // send to bluetooth module
},
),
Text("Motor Level 1---> " + mots,style: const TextStyle(fontSize: 50,color: Colors.green),),
const SizedBox(height: 30.0,),
],
),
),
)
);
}
Future connect(String address) async {
try {
connection = await BluetoothConnection.toAddress(address);
sendData('111');
//durum="Connected to the device";
connection.input!.listen((Uint8List data) {
//Data entry point
// durum=ascii.decode(data);
});
} catch (exception) {
// durum="Cannot connect, exception occured";
}
}
// --------------**************data gonder
//Future send(Uint8List data) async {
//connection.output.add(data);
//await connection.output.allSent;
}
//------------*********** data gonder end
Arduino Codes:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); // RX, TX
String rec_data="5";
int motor_level=10;
void setup() {
pinMode(3, OUTPUT); // for Analog output
Serial.begin(9600);
mySerial.begin(9600); // BlueTooth Data baud,set the data rate for the SoftwareSerial port
}
void loop() { // run over and over
if (mySerial.available()) {
rec_data=mySerial.readString();
motor_level=rec_data.toInt();
analogWrite(3, motor_level);
delay(1000);
Serial.println(motor_level);
}
}
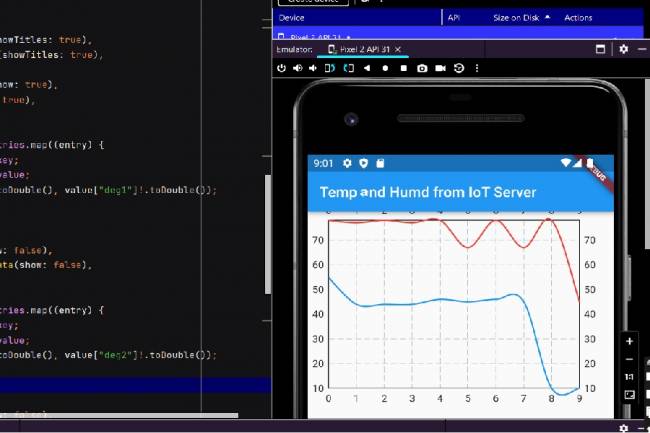
Industrial IoT Applications: