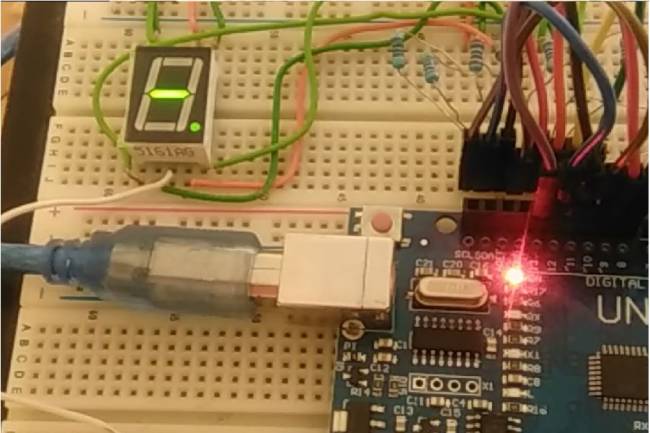

How to make a voltmeter?
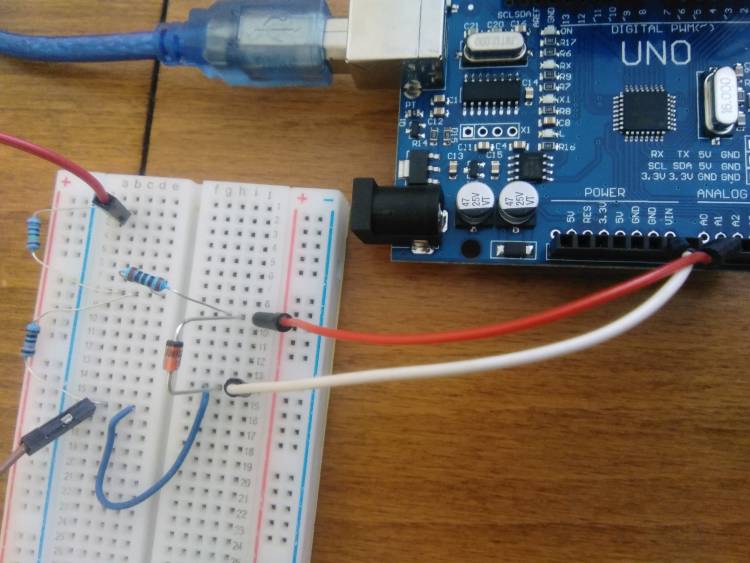
Designing and manufacturing measuring instruments is a difficult task. But the features of microcontroller cards make our job easier. The 6 analog inputs on the Arduino microcontroller board are very useful. We will use one of these analog inputs as a voltage input.
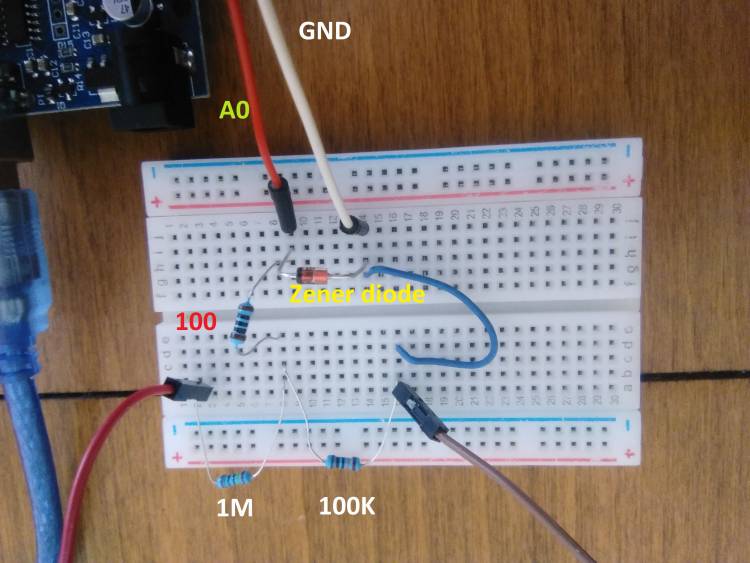
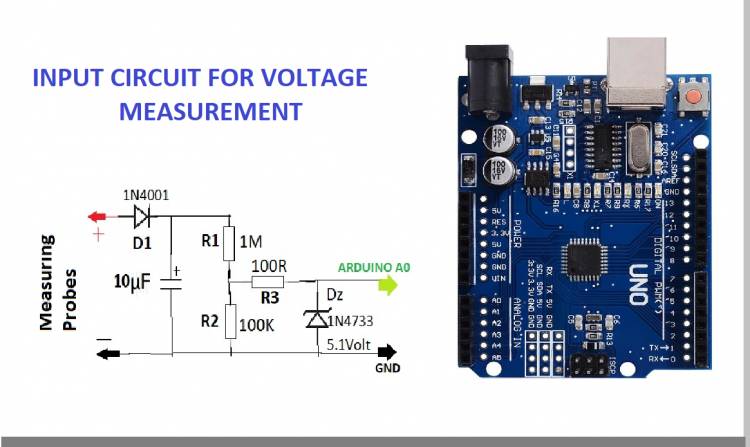
The voltage to be measured may be high. In this application, we have determined a voltage range between 0 and 50-55 volts. Since we can apply more than 5 volts to the analog inputs, we need to divide the voltage to be measured at the input by a large resistor. We did this division with the help of resistors R1 and R2.
Youtube Channel:
When the voltage on R1 exceeds 5-5.1 volts, we used a zener diode so that it would not damage the microcontroller board. This zener diode is a 5.1 volt zener diode. The 1N4733 zener diode is short-circuited when the voltage exceeds 5.1 volts. And so the microcontroller protects the board.
The codes above are the codes used to get the value of the analog voltage on R1.
Arduino Codes:
int s0[] = {1,1,1,1,1,1,0,0};
int s1[] = {0,1,1,0,0,0,0,0};
int s2[] = {1,1,0,1,1,0,1,0};
int s3[] = {1,1,1,1,0,0,1,0};
int s4[] = {0,1,0,0,1,1,1,0};
int s5[] = {1,0,1,1,0,1,1,0};
int s6[] = {1,0,1,1,1,1,1,0};
int s7[] = {1,1,1,0,0,0,0,0};
int s8[] = {1,1,1,1,1,1,1,0};
int s9[] = {1,1,1,1,0,1,1,0};
int s10[]= {1,1,1,1,1,1,0,0};
void setup()
{Serial.begin (9600);
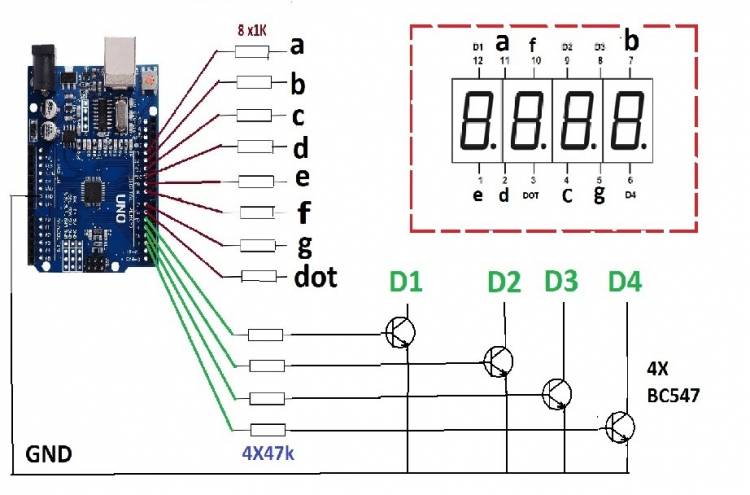
pinMode(13, OUTPUT); // a
pinMode(12, OUTPUT); // b
pinMode(11, OUTPUT); // c
pinMode(10, OUTPUT); // d
pinMode(9, OUTPUT); // e
pinMode(8, OUTPUT); // f
pinMode(7, OUTPUT); // g
pinMode(6, OUTPUT); //DOT LED <-----------
pinMode(5, OUTPUT); // D1
pinMode(4, OUTPUT); // D2
pinMode(3, OUTPUT); // D3
pinMode(2, OUTPUT); //D4
}
void loop()
{
float volt_in = analogRead(A0);// Vin INPUT
float deg=(volt_in/1023)*53; // for max. 55 volt
String svalue=String(deg);
int st_len=svalue.length();
if(st_len==4){
digitalWrite(6,HIGH);
digitalWrite(5,LOW);
if(svalue[0]=='0'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s0[i-1]); digitalWrite(6,HIGH);}delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='1'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s1[i-1]); digitalWrite(6,HIGH);}delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='2'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s2[i-1]);digitalWrite(6,HIGH); }delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='3'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s3[i-1]); digitalWrite(6,HIGH);} delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='4'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s4[i-1]); digitalWrite(6,HIGH);} delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='5'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s5[i-1]);digitalWrite(6,HIGH); } delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='6'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s6[i-1]); digitalWrite(6,HIGH);} delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='7'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s7[i-1]);digitalWrite(6,HIGH); }delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='8'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s8[i-1]); digitalWrite(6,HIGH);}delay(5);digitalWrite(4,LOW); }
if(svalue[0]=='9'){digitalWrite(4,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s9[i-1]);digitalWrite(6,HIGH); } delay(5);digitalWrite(4,LOW);}
if(svalue[2]=='0'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s0[i-1]); } delay(5);digitalWrite(3,LOW);}
if(svalue[2]=='1'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s1[i-1]); } delay(5);digitalWrite(3,LOW);}
if(svalue[2]=='2'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s2[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='3'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s3[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='4'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s4[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='5'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s5[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='6'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s6[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='7'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s7[i-1]); } delay(5);digitalWrite(3,LOW);}
if(svalue[2]=='8'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s8[i-1]); }delay(5);digitalWrite(3,LOW); }
if(svalue[2]=='9'){digitalWrite(3,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s9[i-1]); } delay(5);digitalWrite(3,LOW);}
if(svalue[3]=='0'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s0[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='1'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s1[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='2'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s2[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='3'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s3[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='4'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s4[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='5'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s5[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='6'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s6[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='7'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s7[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='8'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s8[i-1]); }delay(5);digitalWrite(2,HIGH); }
if(svalue[3]=='9'){digitalWrite(2,HIGH);for(int i=1;i<9;i++) { digitalWrite(14-i,s9[i-1]); }delay(5);digitalWrite(2,HIGH); }
Serial.println(svalue[1]);
Serial.println(svalue[2]);
Serial.println(svalue[3]);
Serial.print(deg);
Serial.println(" Volt");
delay(3);}